
陈源培不是一个传统真谛上的“学霸”。
在进入大学之前,他最参加的事情是打游戏。FPS、MOBA,他什么都玩,有些游戏时长达几千小时。致使高考前一天,他还在寝室打牌。当今回头看,陈源培依然不认为这是一段需要被改良的资格。违反,他认为游戏带给他一个进犯的领路:只须一个东说念主办续参加一件事,不休试错、升级、复盘,终末就会变得越来越好。
这套逻辑也皆集了他之后的东说念主生轨迹。本科期间,土木专科出生的陈源培简直从 0 驱动进入机器东说念主领域,期骗课余时期学习干系常识和算法,参加种种机器东说念主大赛;其后进入北京大学杨耀东教师团队,他在零基础的情况下,用三个月时期沉寂完成一项强化学习筹办,终末服从发表在东说念主工智能顶级会议上;凭借出色的弘扬,他得到了斯坦福大学李飞飞实验室造访学习的契机,参与完成期骗东说念主类数据测验机器东说念主双臂颖慧操作的始创性筹办。
再之后,他又参加了一个新的“副本”:归国创业。
2024 年 9 月, 23 岁的他和京东系创举东说念主王启斌博士、柴晓杰博士一说念创办了灵初智能(Psi Bot)。不到两年,这家公司累计融资特出 20 亿元。该公司聚焦机器东说念主宇宙模子与具身大脑研发,但愿让机器东说念主能够清爽物理宇宙、谋略算作,并在不同场景中完成长程操作任务。为了终了这一指标,灵初聘任从东说念主类操作数据启程测验模子。
而这条道路的造成,不错纪念到陈源培曩昔几年在强化学习、仿真和颖慧操作领域的筹办资格。
从物体轨迹到东说念主类数据
陈源培最早是一个很典型的强化学习和仿真派。
在北大杨耀东团队时,他参与了双手颖慧操作地方的筹办。这项职责的真谛不单在于算法,更在于阐明了一件面前锋未被无为考据的事情:借助 GPU 并行仿真,高解放度双手操作任务是不错被测验出来的。
那时,仿真服从是机器东说念主强化学习发展的中枢瓶颈之一。2019 年,OpenAI 用 Shadow Hand 完成魔方复兴曾激励震憾,但背后依赖的是大限制 CPU 集群。陈源培则较早斗争到英伟达尚未厚爱发布的一套 GPU 机器东说念主仿真平台。固然早期版块 bug 好多,不时跑不起来,但他很快清爽到,期骗 GPU 同期运行多数仿真环境,将显贵缩短机器东说念主测验成本。
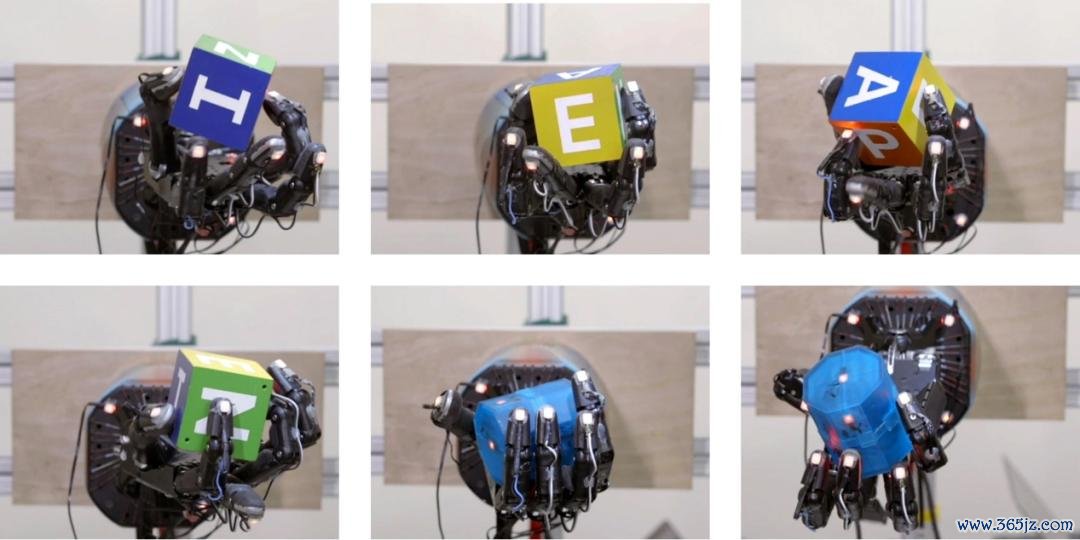
图 |OpenAI Shadow Hand(来源:OpenAI)
其后行业的发展阐明,这一判断是正确的。GPU 并行仿真逐渐成为机器东说念主强化学习的进犯基础设施,也让许多曩昔成本上流的实验变得愈加可行。
不外,在斯坦福进行颖慧操作筹办期间,陈源培也逐渐看到了仿确切范围。仿真环境不错提供海量数据,但确切宇宙中的摩擦、碰撞、柔性物体以及复杂斗争,却很难被实足复刻。无论仿真作念得多传神,机器东说念主最终仍然要面临确切宇宙。
于是,他决定转向另一条路:从确切的东说念主类操作中学习。
陈源培驱动在斯坦福参与期骗东说念主类算作数据测验机器东说念主颖慧操作的筹办。这背后有两个曲折变化:第一,数据来源从机器东说念主遥操作转向东说念主类双手操作;第二,任务抒发从“机器东说念主该如何畅通”,转向“物体该如何变化”。
在陈源培看来,许多看似复杂的操作,实际上都不错被描画为物体状况的变化。把手机从桌上提起,是手机沿着一条轨迹挪动;翻开条记本电脑,是屏幕绕搭钮旋转;开门、整理物品、扬弃器用,也都不错被概述为物体从一个状况到另一个状况的窜改。
这种视角的平正在于,它提供了一种更长入的任务描画方式。曩昔,不同任务频频需要单独设计奖励函数;而若是以物体轨迹为中枢,捏取、扬弃、开合、挪动等行为便领有了共同的抒发言语。
这一想路其后成为灵初智能期间道路的进犯基础。
与许多依赖机器东说念主遥操作数据的决议不同,灵初但愿径直从东说念主类操作中索要通用常识,再衔接效法学习和强化学习迁徙到机器东说念主身上。按照陈源培的清爽,东说念主类操作数据中既包含指标物体的位置、接近方式和操作意图等通用信息,也包含手指发力、关节畅通等与东说念主体结构强干系的细节。前者不错径直被模子学习,后者则由机器东说念主在自身硬件上通过强化学习完成适配。
这亦然灵初宝石布局颖慧手的进犯原因。比较夹爪,五指手在结构上更接近东说念主手,能够更充分地相连东说念主类双手操作数据,缩短从东说念主到机器东说念主的迁徙成本。陈源培并不否定夹爪在固定工业场景中的成本和踏实性上风,但他认为,若是指标是跨场景、跨任务的通用操作才能,机器东说念主最终仍然需方法有“手”。
围绕这一想路,灵初自研了 Psi-SynEngine 数据收集引擎,其中枢是一套动捕手套决议。比较传统真机遥操作方式,数据收集成本可缩短至很是之一傍边。
值得留意的是,这套数据体系并非就业于某一种固定硬件。灵初同期设计了高解放度和低解放度两种手部构型:前者面向复杂颖慧操作,后者在成本和踏实性上更接近夹爪,可障翳对颖慧性条件较低的工业场景。

图 | 动捕手套(来源:灵初智能)
从东说念主类数据到宇宙模子
若是说斯坦福时期的筹办让陈源培信服,东说念主类操作数据能够为机器东说念主提供比仿真更丰富的学习素材,那么创业之后,一个新的问题很快出现了:只是领独特据,并不等于机器东说念主得到了才能。
原因在于,东说念主和机器东说念主并不生计在吞并个肉体里。不异是提起一个杯子,东说念主类会使用几十块肌肉协同完成算作;而机器东说念主则领有实足不同的关节结构、驱动方式和截至逻辑。即便看到了不异的操作过程,也无法简短复现东说念主类算作。这种从东说念主到机器东说念主的各别,被行业称为 Embodiment Gap(具身鸿沟)。
在陈源培看来,东说念主类数据确切有价值的部分,并不是具体的手指轨迹,而是荫藏在操作过程中的指标、战术和宇宙规则。问题变成:机器东说念主如何从海量东说念主类操作数据中索要这些常识?
博亚体育app官方网站他和灵初给出的谜底,是宇宙模子。
2026 年,灵初发布新一代具身模子 Psi-R2。与传统 VLA 主要学习“看到什么就践诺什么算作”不同,Psi-R2 被界说为 World Action Model(宇宙算作模子)。关于机器东说念主而言,一个算作是否正确,频频取决于它对未来的预判。当机器东说念主准备完成一项任务时,它不仅需要知说念手应该如何挪动,还需要估计面前算作会如何影响后续格局,以及我方是否正在接近指标状况。
换句话说,它既要学会行为,也要学会估计行为的后果。
举例,在拒绝纸盒包装任务中,机器东说念主需要连气儿完成识别纸盒结构、颐养捏取姿态、张开纸盒、捏取物品等多个格局。这并不是几个互相沉寂算作的简短拼接,而是一项具有明确指标的长程操作任务。关于 Psi-R2 来说,它不仅要决定下一步应该如何挪动机械手,还需要不息理奉命务程度,并笔据面前状况谋略后续算作,最终完成通盘操作过程。比较传统战术模子,它更像一个同期理奉命务指标和未来状况变化的行为谋略系统。
另一套模子 Psi-W0 则承担着对未下宇宙进行推演的任务。按照灵初的界说,Psi-W0 是一个 Action-Conditioned World Model。它接纳面前状况和候选算作,并估计未来可能出现的落幕。
从名义上看,这与许多宇宙模子的想路访佛。但灵初认为,Psi-W0 最进犯的价值并不是生成未来视频,2026世界杯技术统计而是完成战术评估与数据滚动。原因在于,Psi-R2 的测验数据简直全部来自告捷样本。模子能够学习“正确的操作应该是什么神志”,却很难知说念“失实操作会导致什么落幕”。而关于强化学习而言,赶巧需要多数告捷与失败的响应,才能不休优化战术。
因此,Psi-W0 被赋予了一个额外变装:机器东说念主的里面评测系统。
以倒酒任务为例,机器东说念主可能存在多种不同的践诺决议。杯子的歪斜角度是否合理?液体是否会溢出?面前算作是否会影响后续操作?Psi-W0 会提前推演这些可能出现的未来状况,对不同算作决议进行评估与比较。机器东说念主无谓把通盘尝试都放到确切宇宙中完成,而是能够先在模子构建的“瞎想宇宙”中完成推演,再聘任更优战术践诺。
更进犯的是,Psi-W0 还承担着跨越具身鸿沟的任务。
在东说念主类和机器东说念主之间,存在自然的实质各别。不异一个操作任务,东说念主类依靠手掌、手指和手腕协同完成,而机器东说念主领有实足不同的关节结构、解放度和能源学特点。因此,东说念主类数据无法径直滚动为机器东说念主才能。
在灵初展示的双手协同操作任务中,左侧是东说念主类通过外骨骼手套收集得到的操作轨迹,右侧则是机器东说念主践诺后的落幕。两者完成的是吞并个任务,但使用的肉体结构却实足不同。关于 Psi-W0 而言,它学习的并不是东说念主类具体如何畅通手指,而是任务过程中物体状况如何发生变化。当模子清爽了这种状况变化规则之后,再衔接强化学习寻找顺应机器东说念主自身能源学特点的终了方式,从而完成从东说念主类训戒到机器东说念主训戒的迁徙。
这亦然灵初构建宇宙模子的进犯主张之一:让东说念主类操作数据不再只是测验样本,而能够不息滚动为机器东说念主自身的数据和才能。
在灵初的设计中,东说念主类数据只是通盘系统的开头。东说念主类操作数据最初用于测验 Psi-R2;Psi-W0 对战术进行评估与推演,并将东说念主类训戒调遣为机器东说念主数据;强化学习进一步优化战术;新的机器东说念主数据再反哺下一轮模子测验。最终造成一个不息扩展的数据飞轮。
图|数据飞轮暗示(来源:灵初智能)
这亦然陈培源认为的,具身智能确切需要处治的问题,并不是某一种算法是否更先进,而是如何成立这么一个能够不息产生新数据、新才能的系统。唯有当机器东说念主能够像大模子一样造成限制化学习闭环时,具身智能才有可能出现属于我方的 Scaling Law。
三重宇宙模子
曩昔一年,走宇宙模子道路的公司,彰着不啻灵初智能一家。
但陈源培认为,面前大多数筹议仍停留在意见层面。宇宙模子自己并不径直创造价值,确切进犯的是,它能否匡助机器东说念主在确切场景中完成任务。无论是视频生成模子、VLA,如故多样估计模块,只是被冠以“宇宙模子”的称号,并不料味着找到了具身智能的新范式。
他提到了灵初另一位首席科学家温颖建议的“三重宇宙模子”框架。按照他的清爽,东说念主对宇宙的领路约莫不错分为三层:最底层是客不雅宇宙自己,也等于物理规则;最表层是主体的决策与行为,不错清爽为对未来行为及落幕的预期;而两者之间,还存在一层更曲折的机制。它负责判断哪些信息与面前任务干系,哪些只是布景噪声。

图|三重宇宙模子暗示(来源:温颖)
以捏取手机为例,机器东说念主并不需方法路桌面上的一切。它确切需要温雅的是手机的位置、形势、可捏取区域,以及面前算作会如何改变手机的状况。至于驾驭的麦克风、桌面纹理,致使布景环境中的多数视觉信息,对面前任务而言可能并不进犯。
未来具身模子的中枢才能之一,恰正是这种主动筛选信息的才能。确切有用的模子,不是无区分地接纳通盘输入,而是能够识别哪些信息值得温雅,哪些信息应该被忽略。
陈源培还将这一问题与大模子测验中的数据信噪比干系起来。模子才能较弱时,多数低质料数据概况仍能带来收益;但跟着模子才能进步,连续引入信噪比较低的数据,反而可能稀释有用信息。具身智能不异如斯。视觉、算作、触觉、东说念主类操作轨迹等多模态数据并非越多越好,更进犯的是模子能否索要其中确切与任务干系的常识。
若是把灵初的系统放回“三重宇宙模子”的框架里,Psi-W0 更接近对物理宇宙变化的模拟和估计,Psi-R2 则面向确切算作输出,而中间的曲折,是模子能否主动筛选与任务干系的信息,把东说念主类数据中的有用常识迁徙到机器手上。
这亦然陈源培对“宇宙模子热”的确切魄力。他不是反对宇宙模子,而是反对把宇宙模子当成标语。在他看来,具身智能需要的不是一个单独的模子名字,而是一套可考据的闭环:数据从那处来,如何被筛选和表征,模子如何测验,战术如安在确切硬件上考据,失阑珊幕如何反哺下一轮数据和测验。
具身智能的迷雾丛林
2026 年,具身智能还是成为巨匠成本最密集的 AI 赛说念之一。但成本热度并不料味着期间道路还是拘谨。
仿真派和确切数据派在争论,夹爪派和颖慧手派在争论,VLA 和宇宙模子也尚未造成共鸣。陈源培用“迷雾丛林”来描画当下的行业状况:约莫知说念地方在那处,但具体哪条路能够最终走通,莫得东说念主能够提前给出谜底。正因为如斯,他并不认为未来会由某一个算法意见决定输赢。
无论是宇宙模子、VLA,如故其他不休出现的新框架,它们都可能鼓励行业跳跃,但很难单独组成弥远壁垒。一个算法被建议之后,同业频频能够较快复现;确切难以复制的,是把算法落到确切机器东说念主系统中的才能。这包括数据收集质料、数据处理过程、模子测验训戒、仿真环境搭建、硬件设计、截至器调试、真机评测,以及这些关节之间的协同优化。
这套判断来自他曩昔的科研训戒。无论是双手强化学习,如故斯坦福时期的长程颖慧操作,他终末得到的论断都是:好多时候不是别东说念主不知说念算法,而是系统莫得调到饱胀好。仿真环境、reward 设计、3D 视觉、pose estimation、娇娆截至、真机部署,每个关节都要饱胀细,终末才可能作念出别东说念主作念不到的效果。
灵初因此把硬件、数据和模子放在吞并个系统里。硬件不是孤单家具,而是为了更好收集和承载东说念主类操作数据;数据不是一次性钞票,而是不息测验模子的燃料;模子也不是静态托付物,而要在确切任务中不休被评测、修正和迭代。若是这些问题成立,具身智能公司的价值就不单是作念某个场景里的自动化开采,而是成为机器东说念主期间的基础模子公司。
自然,灵初的道路也存在一定的未知。东说念主类操作数据能否成为具身智能限制化学习的开头,宇宙模子与强化学习能否不息将其滚动为机器东说念主自身的数据与训戒,最终造成访佛大模子期间的数据飞轮,这些问题都还需要时期考据。
陈源培莫得狡饰这种省略情味。在他看来,若是未来某条道路被阐明更有用,灵初需要有才能快速经受和切换。他并不信服任何一个当卑劣行的意见不错径直通向终端。具身智能最终会走向那处,还要靠实验、数据和确切系统小数点考据。
某种程度上,这亦然他我方的东说念主生魄力。从打游戏到归国创业,他很少为我方设定一个远处而明确的特殊。比较繁密的谋略,他更介意目前的问题是否值得参加,以及我方是否确切享受处治问题的过程。
概况这亦然这一代创业者最非常的地方。他们成长于大模子和机器东说念主快速演进的期间,莫得现成的舆图,也莫得被考据过的结局。他们能作念的,只是在一次次实验、失败和迭代中,和我方所信服的期间一说念寻找谜底。
参考链接:
1.https://cypypccpy.github.io/tech-blog.github.io/
2.https://yingwen.io/zh/blog/what-is-a-world-model-modeling/
运营/排版:何晨龙
注:封面/首图由 AI 提拔生成2026世界杯技术统计
 备案号:
备案号: